




Construído em meados dos anos 1990, o Su-37 foi um demonstrador de tecnologia baseado no Su-35 (Su-27M). A grande inovação em relação ao Su-35 era o inédito sistema de empuxo vetorado (TVC), que ofereceria uma capacidade de manobras ainda maior para a plataforma.
Desenvolvedor e Fabricante
Desenvolvido pela Sukhoi Design Bureau de Moscou e produzido pela planta de aeronaves da cidade de Komsomolsk-on-Amur (KnAAPO, Komsomolsk-on-Amur Aircraft Manufacturing Association), ambas pertencentes à Sukhoi Company.
Função
Demonstrador de tecnologia para um caça multifunção pesado de quarta geração avançado, segunda geração da família Flanker, especializado em missões de superioridade aérea ar-ar (CA, Counter-Air) – de modo que o principal objetivo seria inibir, dificultar ou impedir a atuação de aeronaves inimigas sobre uma determinada zona.
Tripulação e Cockpit
O cockpit é ocupado por apenas um piloto (monoposto ou monoplace) em um acento ejetável K-36DM. O aumento da inclinação do assento para 30° permitiu ao piloto sustentar cargas g mais altas durante as manobras enquanto permanecia totalmente no controle da aeronave; isso lhe permitiu usar ao máximo as capacidades da aeronave, aumentando as chances de sucesso da missão.
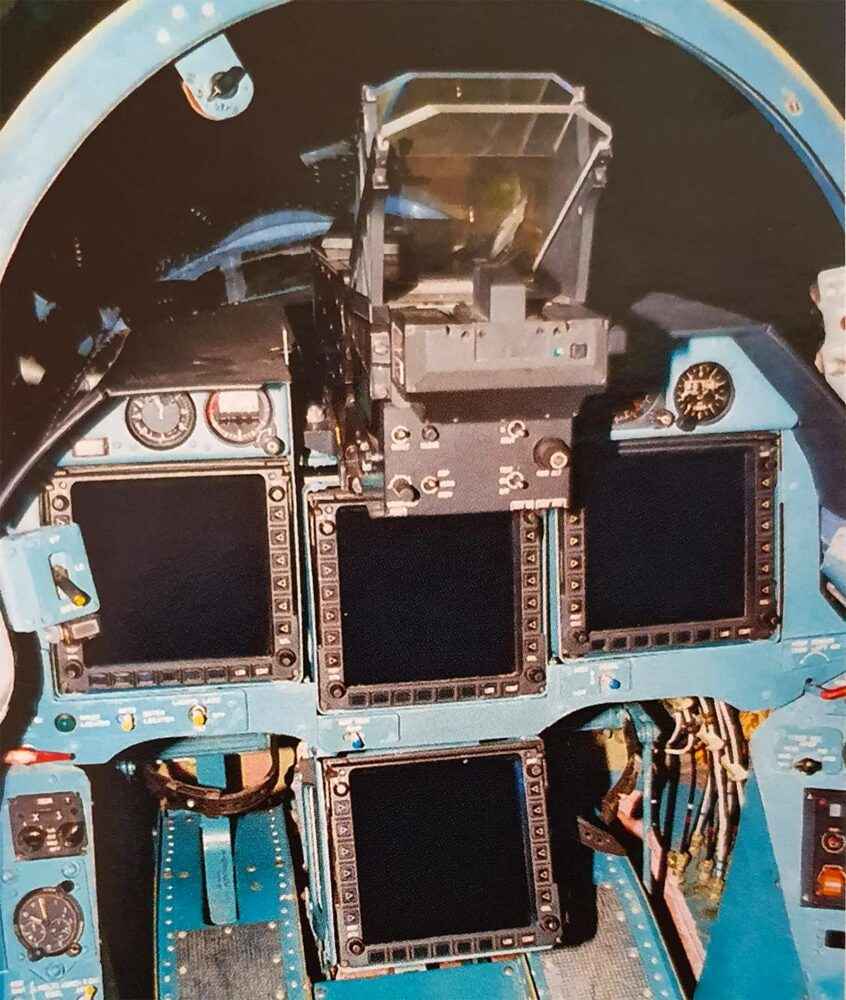
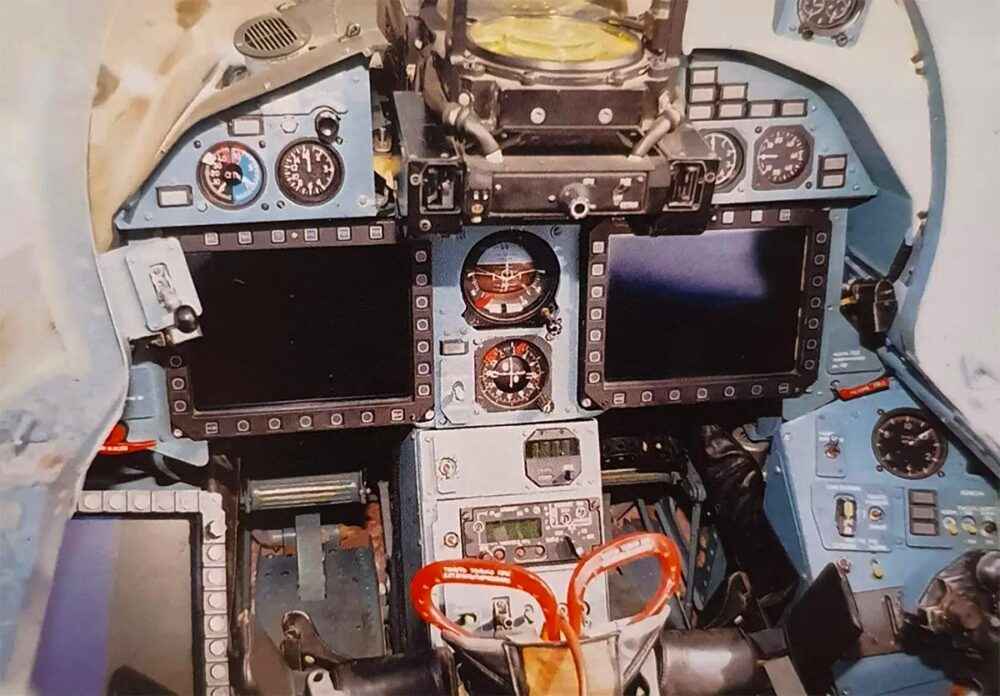
O cockpit era dominado por quatro grandes telas multifuncionais coloridas (CMFD, Color Multi-Function Display) de LCD fornecidas pela empresa francesa Sextant Avionique; estas tinham melhor proteção contra luz de fundo do que o tubo de raios catódicos do Su-27. As telas foram dispostas em forma de T, com uma tela multifuncional de dados aéreos e de navegação, uma tela de exibição de situação tática, uma tela de status do sistema (exibindo mal funcionamento e danos de batalha) e uma tela de exibição de seleção de armas e sistemas. Todos os quatro LCD’s eram intercambiáveis quanto às informações que poderiam apresentar – o piloto podia selecionar as informações necessárias em qualquer um deles. Um HUD multifuncional grande angular também foi instalado.
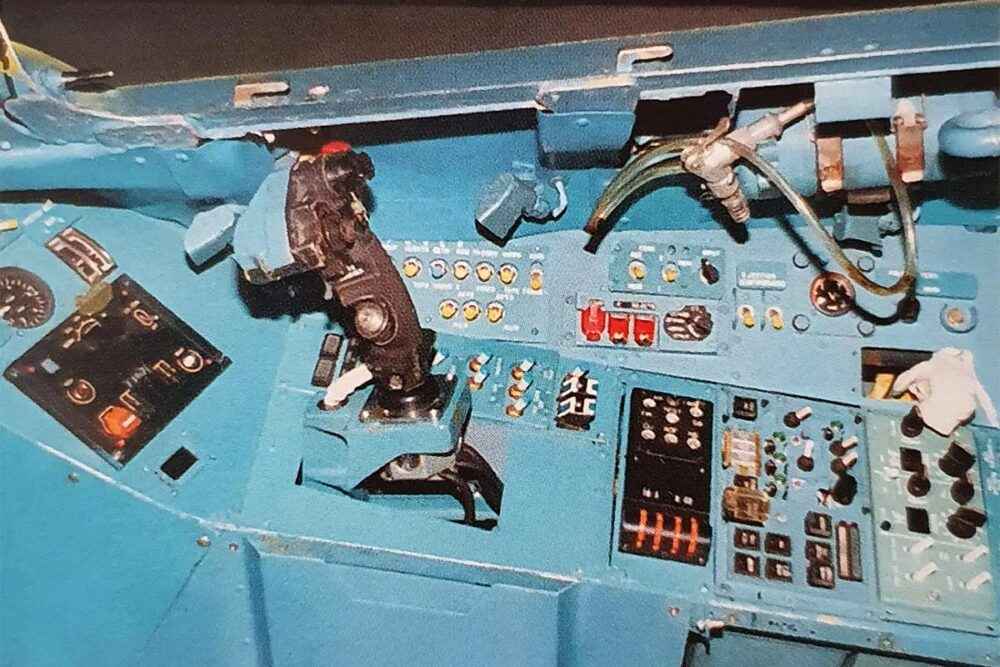
O cockpit estava equipado com um manche lateral sensível à pressão com movimento limitado e manete de aceleração sensível à pressão (power-by-wire). Esses recursos aprimoraram a precisão do piloto e a segurança de voo, pois não havia risco de o piloto inadvertidamente mover o manche ou manete durante as manobras de alto g. A integração do sistema de controle de motor eletrônico com autoridade total (FADEC, Full Authority Digital Engine Control) com TVC automático tornou a aeronave extremamente ágil em AoA (Angle of Attack, Ângulo de Ataque) elevados e velocidades ultrabaixas.
Fuselagem e Controle de Voo
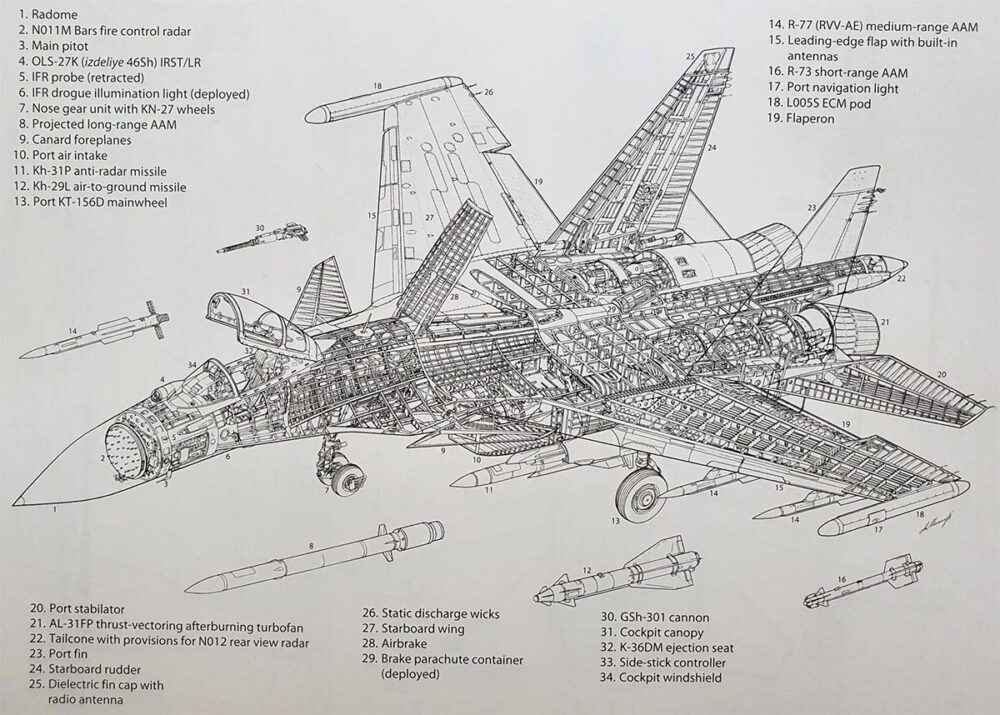
A fuselagem do Su-37 era basicamente a mesma do Su-35 (Su-27M), que estava sem desenvolvimento no início dos anos 1990. Ela era caracterizada pela configuração triplano – canards, asas e profundores. As canards foram originalmente introduzidas na fuselagem padrão Su-27 para oferecer mais manobrabilidade ao Su-35 (Su-27M) – aumentou a instabilidade estática e a razão de sustentação/arrasto durante as manobras, ofereceu controle de pitch mais suave em elevados ângulos de ataque e aliviou a carga de deflexão das asas e fuselagem na raiz das asas durante as manobras.

Ao contrário dos Su-27 de produção equipados com sistemas de controle por fio (FBW, Fly-by-Wire) analógico, o Su-37 possuía um sistema de controle FBW digital – com um circuito de controle de pitch quadruplex e circuitos tríplex de guinada e rolamento; os computadores do sistema de controle operavam em paralelo para aumentar a confiabilidade.

O sistema de controle digital, que governava os bocais móveis e as superfícies de controle, limitava as cargas g automaticamente, dependendo do peso bruto da aeronave e do modo de voo. Essa foi uma medida de segurança de voo para evitar que a estrutura da aeronave se estressasse demais. Como no Su-35 (Su-27M), foi fornecida uma função de recuperação automática de estol; assim, o piloto poderia se concentrar totalmente em fazer o seu trabalho sem ter que se preocupar com cargas g e AoA’s, ou com a velocidade do ar saindo do controle no calor da batalha.
Motor
Dois AL-31FP com 12.500 kg (27.560 lb) de empuxo em pós-combustão. Esta versão era um AL-31F padrão do Su-27, mas equipado com o bocal vetorado AL-100 do motor AL-31FU, que ainda estava em desenvolvimento como solução definitiva para uma futura aeronave de produção em série.

O AL-31FP se beneficiou da experiência adquirida com o AL-31F entre 1979-85 e 12 anos de trabalho de pesquisa e desenvolvimento no turbofan com pós-combustão e empuxo vetorado AL-41F desenvolvido para os caças russos de quinta geração. Ele incorporou o conhecimento proprietário da Lyul’ka-Saturn em áreas problemáticas, como a vedação da junta entre a carcaça do motor e o bocal móvel para evitar a infiltração de gases quentes, resfriamento do bocal em pós-combustão com deflexão máxima e alta resistência ao surge (completa perda de compressão do motor) durante manobras violentas. O bocal móvel axissimétrico foi fixado a em uma estrutura anular e controlado por dois pares de aríetes hidráulicos, inclinando o bocal verticalmente em ±15°. A estrutura era feita de aço nos motores protótipos, mas para economizar peso foi posteriormente substituída por uma estrutura de titânio nos motores de produção. Além disso, o bocal era acionado hidraulicamente nos protótipos, mas foi alimentado pelo sistema de combustível nos motores de produção para melhorar a capacidade de sobrevivência.
A vedação eficaz da junta da carcaça/bocal foi talvez o maior desafio, a infiltração de gases de escape com uma temperatura em torno de 2.000° C e uma pressão em torno de 15 kg/cm² é garantia de causar um incêndio. Outra grande tarefa enfrentada pelos engenheiros foi a automação completa do controle dos bocais, o piloto não precisa se preocupar com alavancas ou interruptores separados do TVC. Os bocais controlados por computadores digitais que fazem parte do sistema de controle FBW; o piloto simplesmente trabalha com o manche e os pedais, e os computadores cuidam do resto. Outra característica engenhosa do AL-31FP foram as pás da turbina monocristalina projetadas para absorver cargas operacionais muito altas.

O AL-31FP funcionou de forma estável em casos de estol total (surgi) na entrada de ar até Mach 2.0, bem como em manobras de giro “clássico”, invertido e plano; isso contribuiu imensamente para a agilidade exclusiva do Su-37, permitindo, por exemplo, que ele voasse brevemente pela primeira vez a 200 km/h durante o Chakra Frolov. O motor era resistente e praticamente imune a estol, o que significava confiabilidade. A NPO Lyul’ka-Saturn também desenvolveu uma série de modificações reduzindo a assinatura de calor do motor em potência militar total, e estas foram oferecidas como opção para os clientes.
O tempo até a primeira revisão do AL-31FP era originalmente de 1.000 horas; a vida útil do bocal AL-100 era inicialmente de 250 horas, embora isso fosse dobrar quando o motor terminasse seu programa de teste de bancada. O peso seco do motor era de 1.570 kg ; o consumo de combustível específico de cruzeiro de 0,677 kg/kgp.hr e a relação peso/empuxo de 0,115. O AL-31FP tinha 4,99 m de comprimento, com um diâmetro de entrada de 0,91 m, embora algumas fontes declarem 0,932 m; o diâmetro máximo era de 1,28 m.
Sistemas de Controle de Tiro
O Su-37 foi equipado com três sistemas de controle de tiro, o radar de controle de tiro pulso-doppler coerente N011M Bars da NIIP, o radar de visão traseira N012 e o sistema eletro-óptico OLS-27K com IRST.

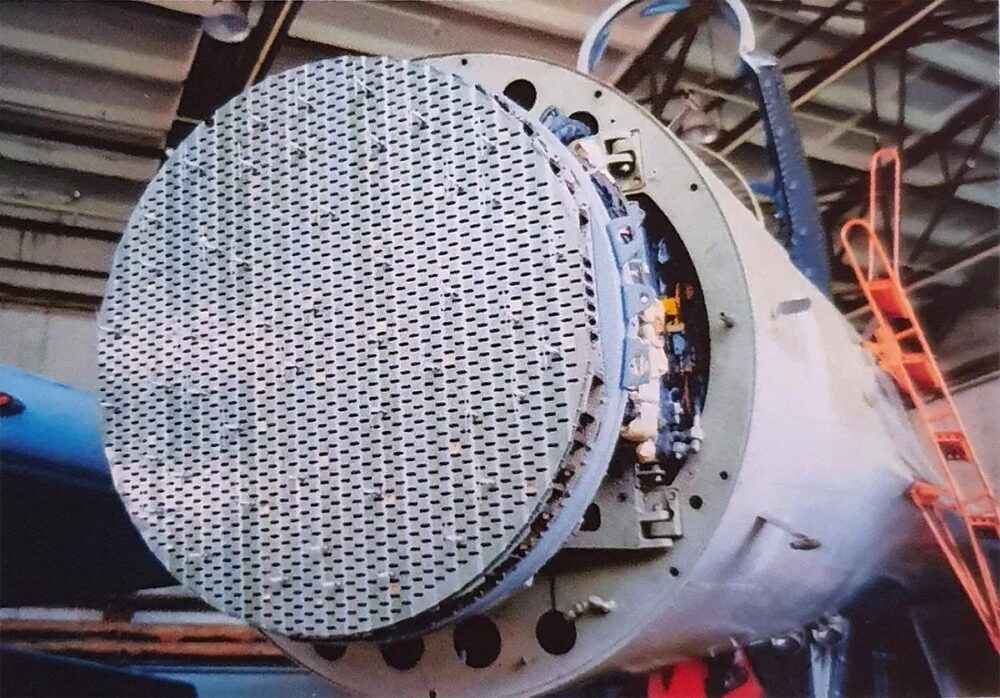
O radar N011M Bars, apresentado pela primeira vez no Moscow Air Show em 1995, foi desenvolvido nos anos 1990 como uma opção de modernização dos Su-27s de primeira geração e para equipar a segunda geração da família Flanker – Su-30MKI, Su-35UB e Su-37 – e o futuro caça de quinta geração russo MiG-1.42.

O novo radar tinha uma matriz de varredura eletrônica passiva (PESA, Passive Electronically Scanned Array) fixa, de modo que o feixe de onda era direcionado eletronicamente; um reposicionador mecânico era uma opção para aumentar o campo de observação. Ele poderia detectar um alvo com um RCS de 3 m² a 140-160 km, rastrear 20 alvos e guiar os mísseis ar-ar de médio alcance R-77E (RVV-AE) contra oito ameaças prioritárias. Alvos de superfície com RCS de 3.000 m², como um navio, poderiam ser detectados a 130-170 km.
Assim como o S-35 (Su-27M), o Su-37 teria um radar de cauda N012, que poderia detectar um caça a 30-50 km. O radar seria instalado no ferrão de cauda, entre os motores, mas nunca atingiu a maturidade; de modo que nunca se tonou operacional em qualquer variante Flanker. Nunca ficou claro se o N012 serviria apenas para alerta contra uma ameaça no aspecto traseiro ou teria também uma solução de tiro para mísseis.

Além do radar, outro sistema de controle de tiro era o sistema eletro-óptico OLS-27K (Optiko Lokatsyonnaya Stantsya) (izdeliye 46Sh) equipado com um IRST e telêmetro laser. O OLS-27K estava posicionado na frente do para-brisas e era uma versão modernizada – novos algoritmos e processador melhorado – do OLS-27 do Su-27, que podia detectar com o IRST um caça de frente em potência militar a 15 km; e a 50 km pelo aspecto traseiro. O telêmetro a laser, utilizado para aferir a distância do alvo, tinha um alcance efetivo de até três quilômetros contra alvos aéreos e cinco quilômetros contra alvos na superfície.

Aviônica
O conjunto de medidas de apoio eletrônico (ESM) foi consideravelmente aprimorado, apresentando um pacote de inteligência de sinais (SIGINT) de nova geração, um módulo de inteligência infravermelha (IRINT), um sistema de alerta e direcionamento de radar (RHAWS), bloqueador (jammer) laser contra mísseis com buscador IR, bloqueador de radar (pod L005S) na ponta das asas e lançadores de chaff/flare. O conjunto de comunicações incluía rádios HF e VHF, link de dados seguros e equipamentos de comunicação via satélite. Os novos equipamentos e aviônicos consumiam mais energia elétrica e hidráulica, requerendo geradores e bombas mais potentes.
Armas
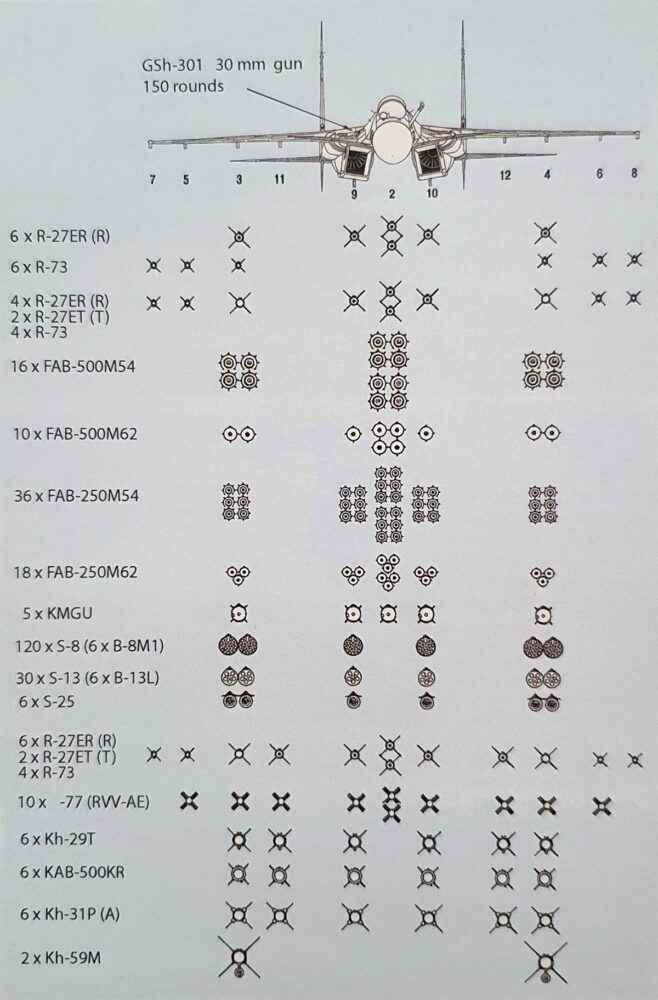
O Su-37 nunca entrou em operação, mas a ideia era equipá-lo com uma variedade de armas multidomínio (ar, solo e mar) de exportação. Assim como o Su-35 (Su-27M), as asas receberam mais um ponto de armas cada em relação ao Su-27, totalizando assim 12 pontos de armas em toda a aeronave para até 8 toneladas de armas. As principais armas ar-ar seriam os mísseis R-27ER, R-27ET e R-77 (RVV-AE) de médio alcance e R-73 de curto alcance. As armas ar-solo incluiriam os mísseis Kh-29T/L, o míssil de cruzeiro tático Kh-59M, o míssil antinavio Kh-31A e antirradiação Kh-31P. As bombas guiadas seriam principalmente as KAB-500KR (TV), além de bombas de queda livre FAB de 250 e 500 kg. Em teoria, o Su-37 também poderia ser equipado com o futuro míssil ar-ar de longo alcance KS-172, que seria empregado contra alvos lentos de grande valor tático, como AWACS e aeronaves REVO, mas este nunca entrou em serviço em qualquer aeronave.
História
No início dos anos 1990, o programa Su-27M (designação interna T-10M), redesignado Su-35 em 1992, visava desenvolver uma segunda geração do Su-27 (T-10S). No decurso de seus testes de voo, as aeronaves de desenvolvimento Su-27M (T-10M) realizaram manobras envolvendo elevados AoA’s e velocidades no ar próximas de zero. O controle ativo em manobras como a Cobra de Pugachov, Cobra Turn e o Deslizamento de Cauda, porém, era praticamente impossível porque os estabilizadores e os lemes eram ineficientes em baixas velocidades no ar. O piloto não conseguia controlar o passo, a guinada e nem a rotação da aeronave, nem manter elevado AoA, o que lhe deixava muito pouco tempo para obter um bloqueio com o radar ou IRST no alvo e disparar os mísseis. Um sistema de propulsão com Controle do Vetor de Empuxo (TVC, Thrust Vector Control), conhecido popularmente como empuxo vetorado, era a solução. Ele era a chave para a superagilidade, permitiria que o caça permanecesse em velocidade zero e elevado AoA por três ou quatro segundos (ou seja, em teoria, tempo suficiente para bloquear e disparar um míssil) ou recuperar-se rapidamente desse modo.

A Sukhoi OKB começou a pesquisar o TVC já em 1983; com os trabalhos prático iniciando em 1988 e 1990 com as bancadas de teste LL-UV (KS) e LL-UV (PS) respectivamente. A primeira utilizou um caça Su-27 com um motor AL-31F equipado com um bocal circular móvel axissimétrico (simetria axial) convergente-divergente com ±15° de deflexão na vertical; a segunda utilizou um Su-27UB com um enorme bocal vetorado bidimensional em um dos motores. Os resultados mostraram-se encorajadores e o trabalho para uma versão do futuro Su-27M com TVC começou em 1988. A principal razão por trás disso foi a necessidade de aprimorar a capacidade de manobra da família Flanker, tanto em altas velocidades com altas forças g quanto em velocidades baixas. Toda a experiência acumulada com o Su-27/Su-35 e as últimas tecnologias foram colocadas em jogo. O designer geral Mikhail P. Simonov insistiu em usar bocais de vetoração axissimétricos da bancada de testes LL-UV (KS); testes subsequentes mostraram que ele estava certo.

A Sukhoi OKB selecionou o novo motor AL-31FU (U = upravlyayemoye soplo, bocal vetorado ou “controlável”) para impulsionar o caça; além do TVC, o motor teria sua potência elevada para 12.800 kg (28.220Ib) em pós-combustão completa. Como todos os protótipos T-10M anteriores e a versão de produção inicial Su-27M, o T10M-11 foi construído pelo KNAAPO. A estrutura foi concluída no início de 1995 e entregue à fábrica experimental da Sukhoi para readequação com os novos sistemas e equipamentos. No entanto, os motores AL-31FU pretendidos ainda não tinham sido concluídos; portanto, os motores AL-31FP com 12.500 kg (27.560lb) de empuxo foram instalados temporariamente. Esta versão era um AL-31F padrão equipado com o bocal vetorado AL-100 do motor AL-31FU. É claro que os motores menos potentes reduziriam o desempenho, mas, de qualquer forma, essa solução provisória permitiu que os testes em solo começassem imediatamente.
O décimo primeiro protótipo do Su-35, o T10M-11, inicialmente destinado como bancada de testes do radar N-011M, logo foi submetido a outras modificações, tornando-se assim o primeiro Flanker com empuxo vetorado nos dois motores. O programa foi um esforço conjunto do Sukhoi OKB, NPO Lyul’ka-Saturn e vários outros estabelecimentos e empresas de pesquisa e desenvolvimento (P&D), incluindo a casa de aviônicos francesa Sextant Avionique.

Ostentando uma camuflagem disruptiva de terra-bronze/escuro e originalmente codificada 711 Azul, o T10M-11 foi codificado 711 Branco e fez seu primeiro voo pós-conversão em 2 de abril 1996 nas mãos de Yevgeniy I. Frolov, Herói da Rússia. Igor’ V. Votintsev, outro piloto de testes da empresa, entrou no programa de testes logo depois; em 14 de junho, Frolov e Votintsev haviam realizado 12 voos no T10M-11.
Na primavera de 1996, o T10M-11 foi apresentado a especialistas do setor e à imprensa. A aeronave recebeu uma nova designação oficial para refletir as principais mudanças no motor e nos aviônicos, foi chamado de Sukhoi Su-37 (de certa forma uma nomenclatura de marketing, já que era basicamente um Su-35 com TVC). O Ocidente também reconheceu devidamente essas mudanças e o Su-37 recebeu o nome de relatório da OTAN “Flanker-F”.

Pilotado por Yevgeniy Frolov, o Su-37 roubou a cena no show de Farnborough International 96 em setembro de 1996. O Su-37 foi capaz girar 180° em um movimento de cabragem e apontar o nariz para o aspecto traseiro, permanecendo nessa posição por tempo suficiente para teoricamente disparar um míssil contra um caça inimigo em perseguição. Essa manobra espetacular foi apelidada de Super Cobra – ou, como o próprio Frolov chamou, Stop Cobra. A falta de limites de ângulos de ataque (AoA) e de arfagem tornou possível usar um aumento adicional considerável de sustentação gerado pelo fluxo de ar instável em certas atitudes.
O Super Cobra logicamente evoluiu para um salto mortal de 360° que ficou conhecido como Frolov Chakra – uma manobra única que invariavelmente deixava os espectadores boquiabertos. Outras manobras incluíram um ioiô de alta velocidade realizado em menos de dez segundos, uma curva com estol em uma subida vertical, manobras Cobra com AoA de 150° a 180° (com uma espera de três ou quatro segundos), um deslizamento de cauda transformando-se em um wingover e assim por diante. O Su-37 tinha todos os pontos fortes de seu antecessor, o Su-35 – capacidade de primeiro ataque, sistemas de designação de alvo e processamento de dados duplicados e à prova de obstrução, a capacidade de destruir alvos terrestres enquanto fica fora do alcance das defesas aéreas inimigas, automação de todos os modos de voo, incluindo acompanhamento de terreno e ação em grupo; eles apenas deram um passo adiante no Su-37.
Claro, tudo tem um preço. O Su-37 tinha menos combustível e alcance menor do que o Su-27 (3.880 km) por causa do peso adicional dos novos aviônicos. No entanto, com a capacidade de reabastecimento em voo, isso claramente não era um problema significativo.
Em 1997, a Sukhoi incluiu o Su-37 na lista de exibição do 42º Paris Air Show. No entanto, o caminho para Le Bourget acabou sendo longo e árduo. O ocupado programa de testes de voo e obstáculos burocráticos conspiraram contra o Su-37, e o Ministério da Defesa não autorizou a demonstração da aeronave em Le Bourget, independentemente do fato de ter sido exibida no Ocidente há um ano!
O piloto de testes Yevgeniy Frolov, que chegou a Paris como passageiro em um avião de passageiros, não deixou as coisas desmoronarem. Ele estava pronto para falar com praticamente qualquer pessoa nos altos escalões para obter permissão para o Su-37 ir para Le Bourget. A ajuda geralmente vem quando você menos espera. Uma reunião com Yakov M. Urinson, que foi Vice Primeiro-Ministro da Rússia e Ministro da Economia (e presidente da delegação russa na feira), e o embaixador russo na França, Yuriy A. Ryzhov, foi o suficiente. As rodas foram acionadas; alguém no Ministério da Defesa aparentemente foi demitido e a aprovação foi recebida dentro de 24 horas, com documentos devidamente assinados e tudo.
A aeronave chegou a Paris em 19 de junho, o dia de encerramento do show, usando o código de exibição Le Bourget 344; o código tático foi então alterado para “711 Branco”. Muitas das delegações atrasaram sua partida de Le Bourget apenas para dar uma olhada no Su-37. No entanto, a exibição do voo foi marcada por um incidente. Os três primeiros voos de demonstração ocorreram normalmente, mas no quarto voo o trem de pouso não se retraiu. Frolov fez uma Cobra Pugachov e aterrissou às pressas, interrompendo a exibição. Aconteceu que alguém havia movido a alavanca de extensão de emergência, desativando a retração da engrenagem. Obviamente, uma coisa simples assim foi imediatamente resolvida e o “711 Branco” executou imediatamente outra rodada de exibição perfeita.
Logo depois, o Su-37 participou do show aéreo do MAKS-97 (19 a 24 de agosto), fazendo principalmente voos de demonstração e aparecendo no parque estático no último dia. Os representantes da Sukhoi no local fizeram um grande esforço para impedir que o público se aproximasse muito, provavelmente temendo mais danos à aeronave. Na feira IDEX-97 em Dubai, Emirados Árabes Unidos (16 a 20 de março de 1997) e no show aéreo FIDAE-98 (Feira Internacional de Ar e Espaço – Feira Internacional de Aviação e Espaço) em Santiago do Chile (23 a 29 de março de 1998) ) o caça foi, de maneira surpreendente, demonstrado sob uma nova designação, Su-37MR; ninguém parecia saber o que o “R” representava!

Os voos de teste e demonstração demonstraram a excelente robustez do motor AL-31FP ao estol total do compressor, mesmo quando a aeronave estava literalmente voando com 180° de AoA. Sem dúvida, essa foi uma grande conquista da NPO Lyul’ka-Saturn. No entanto, o AL-31FP era uma solução provisória e o AL-31FU era quem deveria entrar em produção na fábrica de motores UMPO em Ufa, capital de Bashkiria (uma das repúblicas constituintes da Federação Russa).
O Su-27 e Su-35 equipados com motores AL-31F e AL-31FM, respectivamente, podiam fazer coisas que outros caças não podiam – como voo em formação com um helicóptero voando a 200 km/h, mas o Su-37 poderia se sair ainda melhor. O empuxo agregado de 28.000 kg (61.730 lb) de dois AL-31FU com empuxo vetorado iria permitir que a aeronave de 25.000 kg ficasse literalmente parada no ar, manobrando em velocidades que as superfícies de controle convencionais não eram mais eficazes.
O AL-31FU foi apresentado na feira Dvigatelestroyeniye 96 (Engine Design 96) em Moscou. Ele teve uma classificação máxima de pós-combustor aumentada para 14.000 – 14.500 kg (30.860 – 31.970 lb) e funcionou de forma mais estável em voo com velocidade mínima. O motor seria fabricado nas versões padrão e ‘tropicalizada’ (a última destinada ao sudeste da Ásia, com proteção aprimorada contra a corrosão). Eventualmente, no entanto, os planos nunca se concretizaram e o AL-31FP mais simples foi quem entrou em produção.
O Su-37 superágil e multifunção foi apenas mais um passo lógico nos esforços do Sukhoi OKB para criar uma família de aeronaves táticas da geração 4+ e quinta geração baseadas no Su-27. Especialistas previram que até o ano de 2020 essas aeronaves poderiam estar vendendo como pão quente. Mais tarde, no entanto, o programa de testes do Su-37 praticamente parou – principalmente devido à falta de interesse dos clientes por aeronaves monoposto. Os clientes estrangeiros da “série Su-30” – principalmente a Força Aérea Indiana e a Força Aérea do Exército de Libertação do Povo Chinês (PLAAF) – preferiram o Su-30MK de dois lugares, que vinha em versões personalizadas. No caso dessas duas nações, era o Su-30MKI (com TVC e canards) e o Su-30MKK (sem TVC e sem canards) respectivamente.
Mais tarde, a Sukhoi OKB fez uma revisão radical do conceito de superagilidade do Su-37, substituindo os motores AL-31FP com empuxo vetorado pelo AL-31F padrão utilizado no Su-27 de produção. Simultaneamente, foram feitas alterações no sistema de controle de voo para que todas as superfícies de controle fossem incluídas em um circuito de controle comum; foi incorporada também a possibilidade de usar empuxo diferencial (potência diferente nos motores) para aumentar a agilidade. Além disso, alguns componentes aviônicos fornecidos pela francesa Sextant Avionique deram lugar a modelos russos. As mudanças diziam respeito principalmente ao conjunto de navegação e ao sistema de instrumentação eletrônica de voo (EFIS). Por exemplo, as quatro telas multifunção coloridas (CMFDs) de LCD da francesa Sextant Avionique no painel de instrumentos deram lugar a três CMFDs de LCD ligeiramente maiores (dois no painel de instrumentos e um no console lateral) desenvolvidos pela Ramenskoye Instrument Design Bureau (RPKB).
O sistema de controle revisado, juntamente com a instalação de novos aviônicos, deu resultados fantásticos. Os especialistas da Sukhoi OKB disseram que a substituição dos motores com empuxo vetorado por motores comuns não prejudicou nem um pouco as capacidades do Su-37 (isso significa que o TVC possui pouca relevância em manobras básicas de combate ou que a Sukhoi tentou minimizar o efeito do downgrade sofrido pelo Su-37 na motorização).
A modificação foi concluída no verão de 2000, com a aeronave realizando seu primeiro voo pós-conversão no início de outubro daquele ano com Yuriy M. Vashchuk (que sucedeu Yevgeniy Frolov como piloto de teste do projeto Su-37) nos controles. Em 27 de abril de 2001, o Su-37 modificado, que passou a ser chamado também de Su-35, foi demonstrado aos funcionários da Sukhoi, altos funcionários do Ministério da Defesa Russo e à imprensa em Zhukovskiy durante uma cerimônia festiva que marcou o 20º aniversário do primeiro voo do T10-7 (o primeiro protótipo do Su-27 Flanker-B padrão). O evento incluiu um voo de demonstração que causou uma impressão duradoura nos convidados; Vashchuk repetiu praticamente todas as manobras acrobáticas que Yevgeniy Frolov tinha realizado na aeronave pré-conversão.
Mais tarde, o Su-37 modificado se apresentou com sucesso no show aéreo da MAKS-2001 (14 a 19 de agosto); os espectadores elegeram seus voos de demonstração como os mais impressionantes do evento. Em outubro daquele ano, a aeronave foi exibida no exterior na Exposição Aeroespacial e de Defesa Coreana (KADE-2001) em Seoul-Inchon.

Infelizmente, em 19 de dezembro de 2002, o “711 Branco” caiu perto de Zhukovskiy durante um voo de teste de rotina. O estabilizador da porta se rompeu durante uma manobra de alto g e o vazamento hidráulico resultante colocou todos os sistemas hidráulicos fora de ação, tornando-o incontrolável. Yuriy Vashchuk ejetou com segurança abaixo de 1.000 m (3.280 pés) e foi recuperado por um helicóptero SAR; o caça caiu 79 km a leste do aeródromo e cinco quilômetros a sudoeste da cidade de Shatoora (região de Moscou). Depois que os destroços foram recuperados e estudados cuidadosamente, os especialistas concluíram que a falha estrutural havia sido causada por fadiga devido às cargas de projeto terem sido excedidas muitas vezes durante os seis anos de carreira da aeronave. Como o “711 Branco” era a única aeronave do programa e não havia pedidos para o modelo, o acidente foi o fim do programa Su-37.
Apesar do fim do programa Su-37 e até mesmo do Su-35 original (que era bem diferente do Su-35S que entrou em operação), parte das soluções aeronáuticas de ambos foram adotas em outros programas, principalmente no Su-30MKI indiano que recebeu do Su-37 os motores AL-31FP com empuxo vetorado e do Su-35/37 o IRST e uma versão ligeiramente menor do radar N011M Bars.










Acredito que seja este caça que aparece no filme “Ameaça Invisível- Stealth”.
Não vi esse filme, mas acredito que não, pois era uma aeronave experimental. Talvez seja outro Sukhoi. Um abraço!